1. Pendahuluan [kembali]
Counter adalah rangkaian digital yang digunakan untuk menghitung jumlah pulsa atau peristiwa tertentu secara berurutan. Counter dapat berupa pencacah naik (up counter), pencacah turun (down counter), maupun pencacah naik-turun (up-down counter), dan umumnya dibangun menggunakan flip-flop sebagai elemen dasar penyimpanan bit. Sedangkan shift register berfungsi untuk menggeser data biner secara berurutan ke kiri atau ke kanan, dan sering digunakan dalam konversi data serial ke paralel atau sebaliknya, serta sebagai buffer penyimpanan sementara.
2. Tujuan [kembali]
- Melengkapi tugas mata kuliah elektronika yang ditugaskan oleh Bapak Darwison, M.T
- Memahami prinsip kerja dasar counter dan shift register dalam sistem digital.
3. Alat dan Bahan [kembali]
A. Alat
1. Baterai
2. DC Voltmeter 3. Power Supply
B. Bahan
1. Resistor
Spesifikasi kapasitor pompa air
Spesifikasi dioda
1. arus searah jangka panjang maksimum pada 75 ° C - 1.0 A
2. arus pulsa maksimum dengan durasi pulsa 3,8 ms - 30 A
3. drop tegangan melintasi dioda pada arus 1,0A - 1,1 V
4. kisaran suhu operasi - -65 ... + 175 ° С
5. frekuensi kerja maksimum - 1 MHz
3. Transistor Bipolar BC547
Konfigurasi pin transistor BC547 S
pesifikasi transistor BC547 1. DC current gain maksimal 800
2. Arus Collector kontinu (Ic) 100mA
3. Tegangan Base-Emitter (Vbe) 6V
4. Arus Base maksimal 5mA2. arus pulsa maksimum dengan durasi pulsa 3,8 ms - 30 A
Konfigurasi pin op amp Spesifikasi op amp
Gelombang I/O op amp
Spesifikasi demultiplexer IC 4052
Model: 4555
Type: CMOS
Logic function: Dual Binary to 1 of 4
Decoder/Demultiplexers
Supply voltage: 3 - 15 VDC
Output current: 4.2 mA Power: 500 mW
Operating temperature: -55 to +125 C
Package/case: DIP16
Mounting: THT
Konfigurasi pin Datasheet multiplexer (IC 4052)
C. Komponen Input
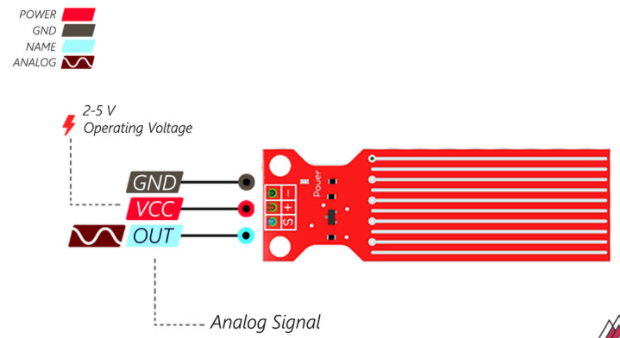
1. Water Level Sensor
Konfigurasi pin water level sensor
"S" stand for signal input
"+" stand for power supply
"-" stand for GND
Spesifikasi water level sensor
1. Tegangan kerja: 5V
2. Bekerja Saat Ini: <20ma br="">
3. Antarmuka: Analog
4. Lebar deteksi: 40mm × 16mm
5. Suhu Kerja: 10 ℃ ~ 30 ℃
6. Berat: 3g
7. Ukuran: 65mm × 20mm × 8mm
8. Antarmuka yang kompatibel dengan Arduino
9. Konsumsi daya rendah
10. Sensitivitas tinggi
11. Sinyal tegangan keluaran: 0 ~ 4.2V
Aplikasi water level sensor
1. Mendeteksi curah hujan Rainfall detecting
2. Kebocoran cairan
3. Kepenuhan tank air
Grafik respon water level sensor
2. PIR Sensor Sensor PIR atau disebut juga dengan Passive Infra Red merupakan sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah dari suatu object. Sensor PIR bersifat pasif, yang berarti sensor ini tidak memancarkan sinar infra merah melainkan hanya dapat menerima radiasi sinar infra merah dari luar. Sensor PIR dapat mendeteksi radiasi dari berbagai objek dan karena semua objek memancarkan energi radiasi, sebagai contoh ketika terdeteksi sebuah gerakan dari sumber infra merah dengan suhu tertentu yaitu manusia mencoba melewati sumber infra merah yang lain misal dinding, maka sensor akan membandingkan pancaran infra merah yang diterima setiap satuan waktu, sehingga jika ada pergerakan maka akan terjadi perubahan pembacaan pada sensor.Sensor PIR terdiri dari beberapa bagian yaitu, Lensa Fresnel, Penyaring Infra Merah, Sensor Pyroelektrik, Penguat Amplifier, Komparator.
a. Lensa Fresnel
Lensa Fresnel pertama kali digunakan pada tahun 1980an. Digunakan sebagai lensa yang memfokuskan sinar pada lampu mercusuar. Penggunaan paling luas pada lensa Fresnel adalah pada lampu depan mobil, di mana mereka membiarkan berkas parallel secara kasar dari pemantul parabola dibentuk untuk memenuhi persyaratan pola sorotan utama. Namun kini, lensa Fresnel pada mobil telah ditiadakan diganti dengan lensa plain polikarbonat. Lensa Fresnel juga berguna dalam pembuatan film, tidak hanya karena kemampuannya untuk memfokuskan sinar terang, tetapi juga karena intensitas cahaya yang relative konstan diseluruh lebar berkas cahaya.
b. IR Filter
IR Filter dimodul sensor PIR ini mampu menyaring panjang gelombang sinar infrared pasif antara 8 sampai 14 mikrometer, sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar antara 9 sampai 10 mikrometer ini saja yang dapat dideteksi oleh sensor. Sehingga Sensor PIR hanya bereaksi pada tubuh manusia saja.
c. Pyroelectric Sensor
Seperti tubuh manusia yang memiliki suhu tubuh kira-kira 32˚C, yang merupakan suhu panas yang khas yang terdapat pada lingkungan. Pancaran sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate menghasilkan arus listrik. Mengapa bisa menghasilkan arus listrik? Karena pancaran sinar inframerah pasif ini membawa energi panas. Material pyroelectric bereaksi menghasilkan arus listrik karena adanya energi panas yang dibawa oleh infrared pasif tersebut. Prosesnya hampir sama seperti arus listrik yang terbentuk ketika sinar matahari mengenai solar cell.
d. Amplifier
Sebuah sirkuit amplifier yang ada menguatkan arus yang masuk pada material pyroelectric.
e. Komparator
Setelah dikuatkan oleh amplifier kemudian arus dibandingkan oleh komparator sehingga mengahasilkan output.

Sensor PIR bekerja dengan cara menangkap pancaran infra merah, kemudian pancaran infra merah yang tertangkap akan masuk melalui lensa Fresnel dan mengenai sensor pyroelektrik, sinar infra merah mengandung energi panas membuat sensor pyroelektrik dapat menghasilkan arus listrik. Arus listrik inilah yang akan menimbulkan tegangan dan dibaca secara analog oleh sensor. Kemudian komperator akan membandingkan sinyal yang sudah diterima dengan tegangan referensi tertentu yang berupa keluaran sinyal 1-bit. Sensor PIR hanya akan mengeluarkan logika 0 dan 1. 0 saat sensor tidak mendeteksi adanya perubahan pancaran infra merah dan 1 saat sensor mendeteksi infra merah. Sensor PIR hanya dapat mendeteksi pancaran infra merah dengan panjang gelombang 8-14 mikrometer. Manusia memiliki suhu badan yang dapat menghasilkan pancaran infra merah dengan panjang gelombang antara 9-10 mikrometer, panjang gelombang tersebut dapat terdeteksi oleh sensor PIR membuat sensor ini sangat efektif digunakan sebagai human detektor. Sensor PIR hanya akan mendeteksi jika objek bergerak atau secara teknis saat terjadi adanya perubahan pancaran infra merah. Pada umumnya sensor PIR memiliki jangkauan pembacaan efektif hingga 5 meter, namun sensor PIR memiliki jangkauan jarak dan sudut pembacaan yang bervariasi, tergantung karakteristik sensor.
Grafik respon sensor Passive Infra Red (PIR)
1. Respon terhadap arah, jarak, dan kecepatan
Pada grafik tersebut ; (a) Arah yang berbeda mengasilkan tegangan yang bermuatan berbeda ; (b) Semakin dekat jarak objek terhadap sensor PIR, maka semakin besar tegangan output yang dihasilkan ; (c) Semakin cepat objek bergerak, maka semakin cepat terdeteksi oleh sensor PIR karena infrared yang ditimbulkan dengan lebih cepat oleh objek semakin mudah dideteksi oleh PIR, namun semakin sedikit juga waktu yang dibutuhkan karena sudah diluar jangkauan sensor PIR. 2. Respon terhadap suhu Dari grafik, didapatkan bahwa suhu juga mempengaruhi seberapa jauh PIR dapat mendeteksi adanya infrared dimana semakin tinggi suhu disekitar maka semakin pendek jarak yang bisa diukur oleh PIR.
3. Infra Red Sensor
Sistem sensor infra merah pada dasarnya menggunakan infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut tidak dapat terdeteksi oleh penerima. Keuntungan atau manfaat dari sistem ini dalam penerapannya antara lain sebagai pengendali jarak jauh, alarm keamanan, otomatisasi pada sistem. Pemancar pada sistem ini tediri atas sebuah LED infra merah yang dilengkapi dengan rangkaian yang mampu membangkitkan data untuk dikirimkan melalui sinar infra merah, sedangkan pada bagian penerima biasanya terdapat foto transistor, fotodioda, atau inframerah modul yang berfungsi untuk menerima sinar inframerah yang dikirimkan oleh pemancar. Konfigurasi pin
Grafik Respon
D. Komponen Output
1. Relay Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi.
Relay terdapat 4 bagian penting yaitu electromagnet (coil), Armature, Switch Contact Point (saklar) dan spring. Untuk lebih jelasnya silahkan lihat gambar di bawah ini. Kontak point relay terdiri dari 2 jenis yaitu: 1. Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada pada posisi close (tertutup).
2. Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berapa pada posisi open (terbuka).
Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan Coil yang berfungsi untuk mengendalikan Besi tersebut. Apabila Kumparan Coil diberikan arus listrik, maka akan timbul gaya Elektromagnet yang kemudian menarik Armature untuk berpindah dari Posisi sebelumnya (NC) ke posisi baru (NO) sehingga menjadi Saklar yang dapat menghantarkan arus listrik di posisi barunya (NO). Posisi dimana Armature tersebut berada sebelumnya (NC) akan menjadi OPEN atau tidak terhubung. Pada saat tidak dialiri arus listrik, Armature akan kembali lagi ke posisi Awal (NC). Coil yang digunakan oleh Relay untuk menarik Contact Poin ke Posisi Close pada umumnya hanya membutuhkan arus listrik yang relatif kecil.
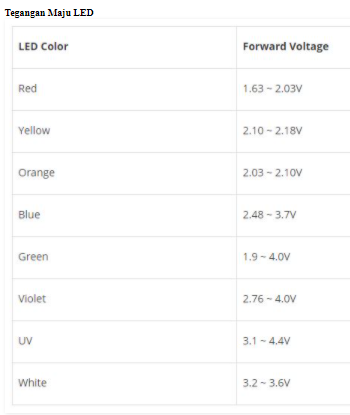
2. LED LED merupakan keluarga dari Dioda yang terbuat dari Semikonduktor. Cara kerjanya pun hampir sama dengan Dioda yang memiliki dua kutub yaitu kutub Positif (P) dan Kutub Negatif (N). LED hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias forward) dari Anoda menuju ke Katoda. Ketika LED dialiri tegangan maju atau bias forward yaitu dari Anoda (P) menuju ke Katoda (K), Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material). Saat Elektron berjumpa dengan Hole akan melepaskan photon dan memancarkan cahaya monokromatik (satu warna). LED atau Light Emitting Diode yang memancarkan cahaya ketika dialiri tegangan maju ini juga dapat digolongkan sebagai Transduser yang dapat mengubah Energi Listrik menjadi Energi Cahaya. Tegangan maju LED 3. Motor DC
Motor yang beroperasi pada arus DC disebut sebagai Motor DC dan motor yang menggunakan arus AC disebut sebagai motor AC. Umumnya kamu tidak akan terlalu banyak menjumpai motor AC tetapi motor DC hampir digunakan dimana saja, yang mana di bidang listrik dinamai DC motor.
Motor DC adalah motor listrik yang merupakan perangkat elektromekanis yang menggunakan interaksi medan magnet dan konduktor untuk mengubah energi listrik menjadi energi mekanik putar, dimana motor DC dirancang untuk dijalankan dari sumber daya arus searah (DC). Sudah lebih dari 100 tahun motor DC brush (disikat) digunakan dalam industri serta aplikasi domestik.
Prinsip Kerja Motor DC
Komponen utama dari Motor DC adalah Winding/liltan, Magnet, Rotors, Brushes, Stator dan sumber arus searah (Arus DC). Ketika armature ditempatkan dalam medan magnet yang dihasilkan oleh magnet maka armature diputar dengan menggunakan arus searah, hal ini menghasilkan gaya mekanik. Dengan memanfaatkan putaran motor DC banyak jenis pekerjaan yang dapat dikerjakan.
E. Komponen Lainnya
1. Ground
Ground adalah suatu sistem instalasi listrik yang bisa meniadakan beda potensial sebagai pelepasan muatan listrik berlebih pada suatu instalasi listrik dengan cara mengalirkannya ke tanah sehingga istilah sehari hari yang sering digunakan yaitu pentanahan atau arde. 2. Logic state
Logicstate berfungsi untuk menunjukkan keadaan logika o dan logika 1. Sinyal biner adalah sinyal digital yang hanya memiliki dua nilai yang valid. Dalam istilah fisik, pengertian logis dari sinyal biner ditentukan oleh level tegangan atau nilai arus sinyal, dan ini pada gilirannya ditentukan oleh teknologi perangkat. Dalam sirkuit TTL, misalnya, keadaan sebenarnya diwakili oleh logika 1, kira-kira sama dengan +5 volt pada garis sinyal; logika 0 kira-kira 0 volt. Tingkat tegangan antara 0 dan +5 volt dianggap tidak ditentukan.
4. Dasar Teori [kembali]
Bagian ini akan paralel dengan Bagian 5.16 dan 5.17 dari bab analisis ac sinyal kecil BJT yang berhubungan dengan efek resistansi sumber dan resistansi beban pada penguatan ac penguat. Sekali lagi ada dua pendekatan untuk analisis. Seseorang dapat dengan mudah mengganti ac untuk FET yang diminati dan melakukan analisis terperinci yang mirip dengan situasi tanpa beban, atau menerapkan persamaan dua port yang diperkenalkan pada Bagian 5.17. Semua persamaan dua port yang dikembangkan untuk transistor BJT berlaku untuk jaringan FET juga karena jumlah yang diminati didefinisikan pada terminal input dan output dan bukan komponen sistem.
Beberapa persamaan yang paling penting diulang di bawah ini untuk memberikan referensi yang mudah
untuk analisis bab ini dan untuk menyegarkan ingatan Anda tentang kesimpulan:

Beberapa kesimpulan penting tentang penguatan konfigurasi transistor BJT adalah juga berlaku untuk jaringan FET. Ini termasuk fakta-fakta berikut:
- Penguatan terbesar dari penguat adalah penguatan tanpa beban.
- Penguatan yang dibebani selalu lebih kecil dari penguatan tanpa beban.
- Impedansi sumber akan selalu mengurangi penguatan keseluruhan di bawah tanpa beban atau tingkat yang dimuat.
Secara umum, oleh karena itu

Ingatlah dari Bab 5 bahwa beberapa konfigurasi BJT sedemikian rupa sehingga impedansi keluaran
sensitif terhadap impedansi sumber atau impedansi input sensitif terhadap beban yang diterapkan. Namun, untuk jaringan FET:
Karena impedansi tinggi antara terminal gerbang dan saluran, orang umumnya dapat mengasumsikan bahwa impedansi input tidak terpengaruh oleh resistor beban dan output impedansi tidak terpengaruh oleh resistansi sumber.
Namun, kita harus selalu sadar bahwa ada situasi khusus di mana hal di atas di atas mungkin tidak sepenuhnya benar. Ambil contoh, konfigurasi umpan balik yang menghasilkan langsung hubungan antara jaringan input dan output. Meskipun resistor umpan balik biasanya berkali-kali lipat dari resistansi sumber, memungkinkan perkiraan bahwa sumbernya resistensi pada dasarnya adalah 0, itu memang menghadirkan situasi di mana resistensi sumber bisa mungkin mempengaruhi resistansi output atau resistansi beban dapat mempengaruhi impedansi input. Namun, secara umum, karena isolasi tinggi yang disediakan antara gerbang dan saluran pembuangan atau terminal sumber, persamaan umum untuk penguatan yang dimuat kurang kompleks dibandingkan dengan itu ditemui untuk transistor BJT. Ingatlah bahwa arus basis menyediakan hubungan langsung antara sirkuit input dan output dari setiap konfigurasi transistor BJT. Untuk mendemonstrasikan setiap pendekatan, mari kita periksa konfigurasi bias sendiri dari Gbr. 8.45 with a bypassed source resistance. Substituting the ac equivalent model for the JFET results in the configuration of Fig. 8.46 .

Perhatikan bahwa resistansi beban muncul secara paralel dengan resistansi pengurasan dan sumber
Resistansi sumber Rsig muncul secara seri dengan resistansi gerbang R. Untuk penguatan tegangan keseluruhan
hasilnya adalah bentuk modifikasi dari Persamaan (8.21):
Impedansi output sama dengan yang diperoleh untuk situasi tanpa beban tanpa sumber resistensi:
Impedansi input tetap sebagai berikut
Untuk memperoleh secara keseluruhan AvS ,
yang untuk sebagian besar aplikasi di mana RG >> Rsig dan RD || RL << rd menghasilkan
Jika sekarang kita beralih ke pendekatan dua port untuk jaringan yang sama, persamaan untuk keseluruhan memperoleh keuntungan menjadi
mencocokkan hasil sebelumnya.
Penurunan di atas disertakan untuk menunjukkan bahwa hasil yang sama akan diperoleh menggunakan kedua pendekatan tersebut. Jika nilai numerik untuk R i, R o, dan AvNL tersedia, maka hanya tinggal mensubstitusikan nilai-nilai tersebut ke dalam Persamaan (8.57). Melanjutkan dengan cara yang sama untuk konfigurasi yang paling umum menghasilkan persamaan pada Tabel 8.2.
5. Percobaan [kembali]
A. Prosedur
- Siapkan segala komponen yang di butuhkan
- Susun rangkaian sesuai panduan
- Sambungkan rangkaian dengan baterai untuk sumber tenaga
- Hidupkan rangkaian
- Apabila tidak terjadi eror, maka rangkaian selesai dibuat
B. Rangkaian Simulasi dan Prinsip Kerja
Prinsip kerja:
- Sinyal input (Vin) yang bervariasi akan menyebabkan perubahan tegangan gate transistor Q1.
- Perubahan tegangan gate ini akan mengontrol arus drain (Id) yang mengalir melalui transistor Q1.
- Arus drain yang bervariasi ini akan menghasilkan sinyal output (Vout) yang diperkuat pada terminal drain.
- Rangkaian ini dirancang untuk memperkuat sinyal frekuensi tinggi dengan gain yang ditentukan oleh nilai R1 dan R2.
C. Video Simulasi
6. Download File [kembali]
- Download rangkaian Mux-demux disini
- Download Datasheet Multimeter disini
- Download Datasheet JFET disini
- Download Datasheet Resistor disini
- Download Datasheet Kapasitor disini
- Download Datasheet Vsine disini
[menuju awal]













































Komentar
Posting Komentar